Low Level
Contents
LowLevel v4.1 PCB
 - 3D PCB Model on KiCAD
- 3D PCB Model on KiCAD  - PCB Diagram on KiCAD
- PCB Diagram on KiCAD
 - Schematic 1/3 on KiCAD
- Schematic 1/3 on KiCAD  - Schematic 2/3 on KiCAD
- Schematic 2/3 on KiCAD
 - Schematic 3/3 on KiCAD
- Schematic 3/3 on KiCAD
Overview
The 4.1 board was never built. It evolved into the version 5.0 board. This board design is based on DBW V4.0 board. The Steering Board V4.1 was built, but never worked well. It turns out that the standard Arduino Motor Control shield can replace the Steering Board.
Steering v4.1 Board



Functionality:
Power is supplied to this board from 12 VDC input on the red Anderson connector from the DBW board to power the H-bridge circuit and L7805 voltage regulator which will step down from 12 to 5 VDC to power the LM393 dual comparator. which controls the direction of the 12 VDC linear actuator which turns the trike. The H-Bridge contains two of each of the following MOSFETs: AOD4189 (PMOS), AOD66406 (NMOS), and 2N7000 (NMOS). The 2N7000 gate voltages will control the gates of the AOD's, allowing the actuator to turn the front wheels left or right. An LM393 Dual comparator is placed before the H-bridge with each of the comparator outputs going to the one of the two gates of the 2N7000s, the inverting inputs having a fixed reference voltage about 1.8 VDC, one non-inverting input connected to the left turn signal, and the other for the right turn signal with the remaining two pins connected to 5 VDC and GND respectively. there is an RJ45 LAN bus connector which receives signals from the Arduino Due (which in itself receives signals from an external RC infrared receiver), which will tell the LM393 comparator to control the H-bridge MOSFETs accordingly to the input steering direction. SB5H100 Schottky Diodes placed in flyback provide fast feedback times when the AOD4189 and AOD66406 MOSFETs switch on and off. The DBW v4.1 Board will be redesigned to fit the new steering board.
Main DBW v4.1 Board
This board is a follow-up to the existing DBW v4 Board (refer to the DBW v4 Board below for its functionality), which will build on what the DBW v4 Board has accomplished. This board functions similarly to the LowLevel V4.1
LowLevel v4 PCB
The V4 LowLevel PCB builds upon the V3.1 PCB. It still communicates over the CAN bus with the manual control or autonomous system from the receiver system. However, the new LLB is the daughter board for the Arduino Due microcontroller board.
Functionality:
- Uses binary control for steering as opposed to a PWM input
- LLB uses internal CAN bus module, removing the need for any external CAN modules
- Runs on 3.3V of power internally with power provided to the Arduino DUE through a 5v regulator on the DBW board
- Steering and throttle headers added to lower connector size


- RJ-45 adapter connected to steering pins

- Brakes use solenoids instead of actuators

- Creates file for outputting date and stores it in SD card
- PCF8523 RTC calculates and stores the following using system time:
- Milliseconds since compile time
- Epoch time
- Date (YYYY/MM/DD)
- Day of the week
- Standard time (HH:MM:SS) (AM/PM)
DBW v4 Board


Power is supplied to the board through the 12 V input on the screw terminal closest to the Arduino DUE and steps this down to 5V and 3.3V through its voltage regulators. The 12V input also supplies the solenoid brakes and to the steering board. CAN L and H are also accessible on this screw terminal or can be connected to from the CAN header that is above the steering header. DBW v4 uses level shifters to convert the peripheral voltage 0-5V to 0-3.3 V which the Arduino DUE is able to operate at. The advantage of this is that the Arduino DUE's internal CAN bus can be used instead of an external module with the trade off being the added complexity of the level shifters. An improvement that can be made is to replace 5 V peripherals with 3.3 V peripherals to reduce the amount of level shifters. This is relevant to the current angle sensors using 5 volts and they can be easily converted to using 3.3 V. The brake relays on the DBW v4 board are setup backwards with 24 V being sent to the brakes by default and this needs to be fixed in future iterations. Other future improvements are the addition of RJ-45 connectors that will eliminate the need for a converter box to be used. Problems with the 5V and 3.3V regulator have been found with the 3.3V regulator failing on at least 3 boards. The 12 volt input is directly connected to multiple IC's and has a high risk of damage if there is a voltage spike created from the connected power supply to the board.
LowLevel v3.1 PCB
Functionality:
- The LowLevel Board (LLB) is a daughter board (shield) for an Arduino Mega microcontroller. It has been renamed "Drive-By-Wire". It implements drive-by-wire, turning a trike into a CAN-bus based vehicle compatible with commercial self-driving equipment. The LLB communicates over the CAN bus with the higher-level autonomous system or manual control from the receiver system. It directly manages the actuators: the throttle to the motor, the turning servo, and the brakes.
- Motion directives are received on a CAN bus interface, processed, and articulated.
- System status (turn angle, wheel linear velocity) is reported back to CAN bus.
- LLB v3.x has the following interfaces:
- One CANbus channel on two connectors; a DB9-M and a three-pin screw terminal. The board includes a 120 ohm terminating resistor.
- X3 Motor (DB-15M): Interface to E-bike controller
- Analog voltage (approximately 0v to 4v) output to hub motor throttle
- Digital outputs for activating reverse and regenerative braking.
- PWM output for PWM-operated braking (no longer used)
- Analog inputs for hall sensor feedback from motor controllers supporting this feature. These inputs are NOT 5V SAFE. They absolutely require external supporting circuitry.
- A few spare connections for future expandability, such as a second DAC output and one digital GPIO.
DETAILS > DB15M
- Steering Header (RJ45):
- Two sets of pins to support analog potentiometers (5v, signal input, ground) giving angle of front wheels
- One PWM output (with its own ground) to drive the steering actuator.
- This cable is broken out into its component signals using an RJ45 patch jack, mounted near the steering actuator.
- X4 (ODO): Cyclometer (reed switch) input jack. This is pulled high by default, and brought low when the magnet passes the sensor.
- High current pluggable terminal for solenoid brakes:
- Connections for ground, 12v, and 24v.
- Two relay outputs to solenoids: on/off and 12/24V.
- Steering Header (RJ45):
- The LowLevel runs on 5V power, and provides outputs for sensors. Note that the Arduino Mega 2560's regulator has a fairly low current limit, and should not be used for any significant current supply. The Arduino's DC input jack accepts 12V, and its USB port may be connected to a typical USB power supply. The 12V is provided by a DC-DC converter from the main battery (36 to 50V).
Image: 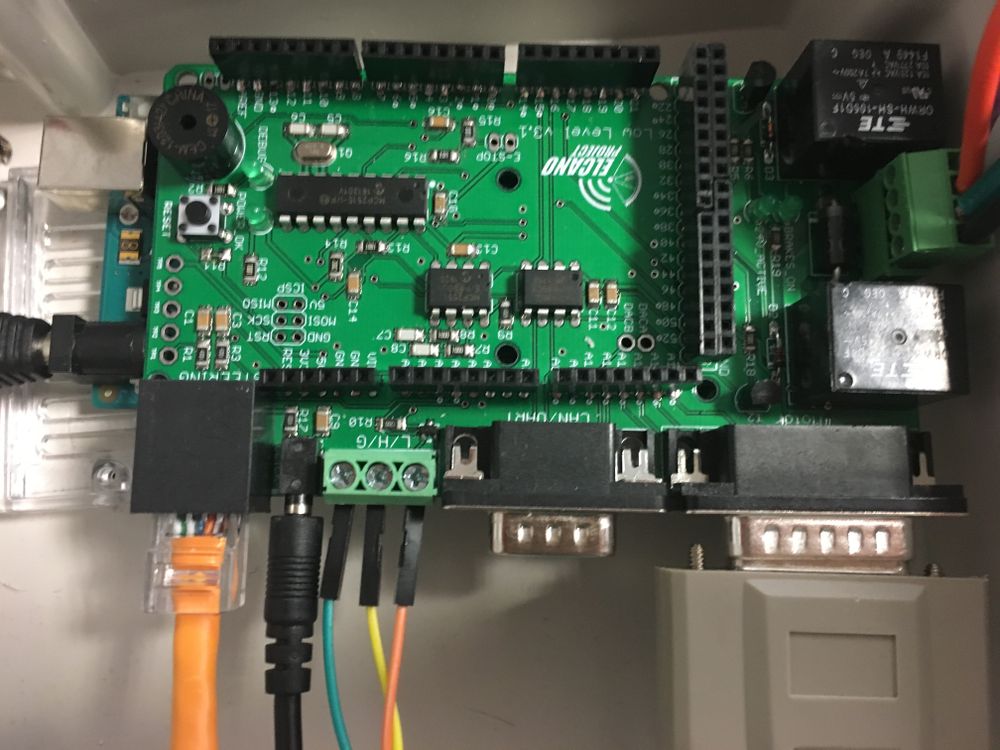

NEXT > High Level
LowLevel v2.1 PCB
Functionality:
- Version 2.1 used UART serial connections to other boards instead of the CAN bus. It interprets messages from higher-level autonomous systems or manual controls (RC, joystick). It directly manages the state of the actuators; the hub motor, the turning servo, and the brakes.
- Depending on the current firmware or operating mode, motion directives are received on one of three interfaces;
- ElcanoSerial from the combined C3/ C4/ C6 High Level board
- RC receiver
- Manual Joystick
- LLB v2.x has the following low-level interfaces:
- X2 Cruise (DB-25F) - ElcanoSerial messages from High Level.
- X3 Motor ( DB-15M): Analog voltage (0,4v) output hub motor.
- X1/X5 Turn Sensors (RJ45): SPI wheel angle sensor digital inputs. (Digital urn sensors were never implemented.)
- X4 (ODO): Cyclometer (reed switch) input jack. Board layout was incorrect. This signal needs to be jumpered to Arduino pin D2.
- JP9 (8 pin): Joystick analog input signals.
- JP12 (3 pin): Pulse output signal to steer.
- JP11 (3 pin): Pulse output signal to apply main brakes. (No longer used)
- JP5 (4 pin): Left wheel angle sensor analog input. (Little used since it covers 360 degrees and is less accurate)
- JP6 (4 pin): Right wheel angle sensor analog input. (Trike prefer this, since it is +/- 30 degrees, and more accurate)
- LLB v3.x makes significant wiring changes:
- Removes the ElcanoSerial connection and the DB-25F.
- Removes JP9, joystick analog inputs.
- Removes headers used to interface the RC receiver.
- Adds one CANbus interface on a DE-9F socket. For legacy compatibility UART serial is be available on this interface as well.
LowLevel v1.0 PCB
- The first version of the LLB was called MegaShieldDB. It had similar functionality, but different connectors. It had five DB connectors.
NEXT > High Level