Difference between revisions of "File:Wheel-turn-angle 360-degree-sensor.png"
Jump to navigation
Jump to search
(Shows output from a wheel turn sensor during slow steering servo extension and retraction. Input (x-axis) is pulse width in microseconds. Output (y-axis) is wheel angle, converted from the Arduino's 10-bit ADC (0-1023). Values were converted by multipl...) |
(No difference)
|
{kind=link}
{kind=link}
Latest revision as of 03:31, 2 July 2019
Summary
Shows output from a wheel turn sensor during slow steering servo extension and retraction. Input (x-axis) is pulse width in microseconds. Output (y-axis) is wheel angle, converted from the Arduino's 10-bit ADC (0-1023). Values were converted by multiplying the 10-bit integer by (360/1024) in a spreadsheet. The gap between extension and retraction values is explained by slippage in the steering mechanism.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 03:31, 2 July 2019 | 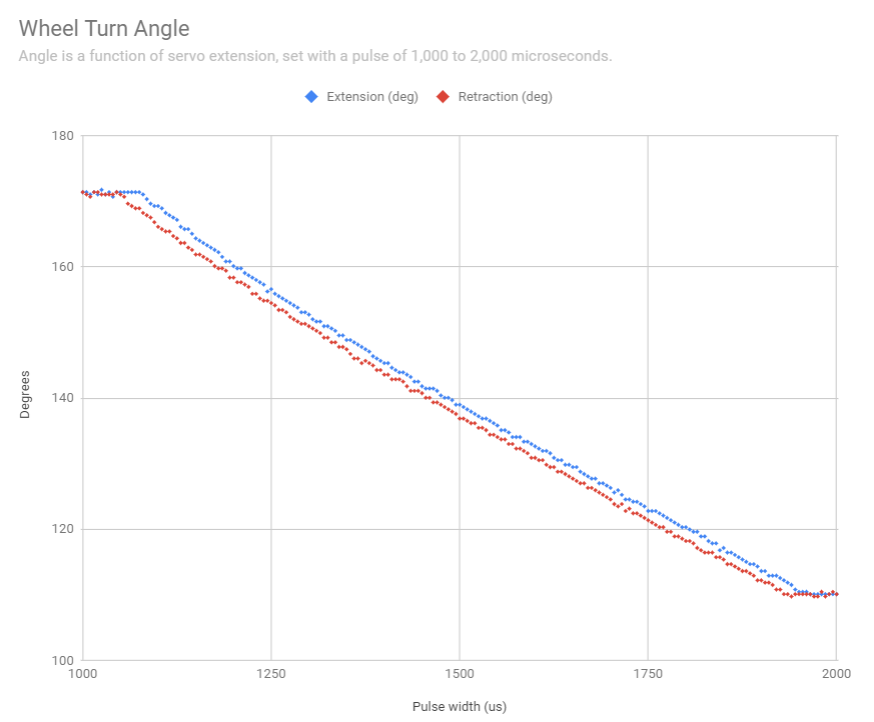 | 874 × 722 (50 KB) | JosephBreithaupt (talk | contribs) | Shows output from a wheel turn sensor during slow steering servo extension and retraction. Input (x-axis) is pulse width in microseconds. Output (y-axis) is wheel angle, converted from the Arduino's 10-bit ADC (0-1023). Values were converted by multipl... |
- You cannot overwrite this file.
File usage
The following page uses this file:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}