File list
Jump to navigation
Jump to search
This special page shows all uploaded files.
| Date | Name | Thumbnail | Size | User | Description | Versions |
|---|---|---|---|---|---|---|
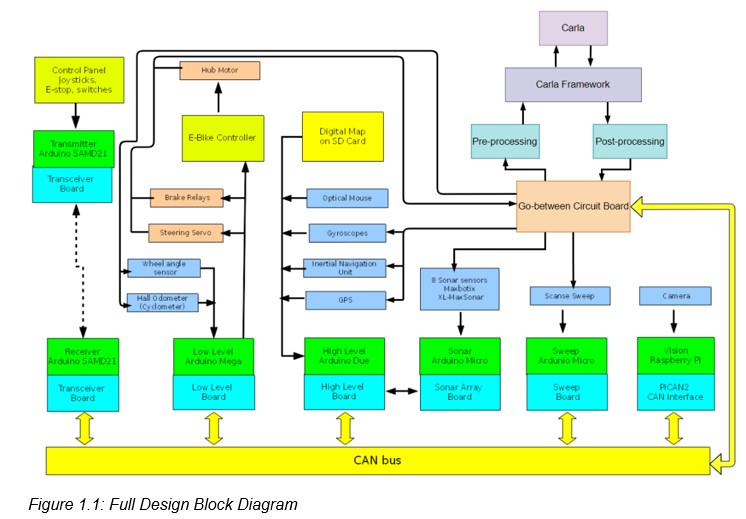
| 03:04, 29 July 2019 | Full Block Diagram.JPG (file) |  |
70 KB | Fnavarro | 2 | |
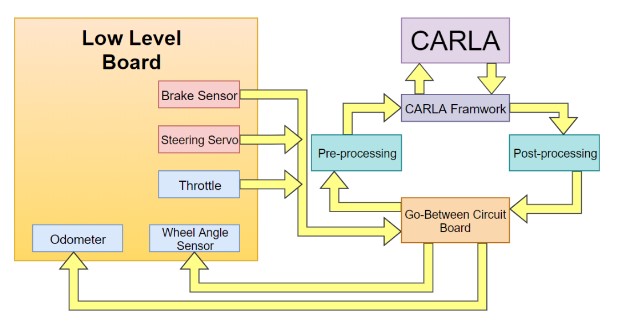
| 00:46, 29 July 2019 | Minimal Block Diagram.jpg (file) |  |
38 KB | Fnavarro | 1 | |
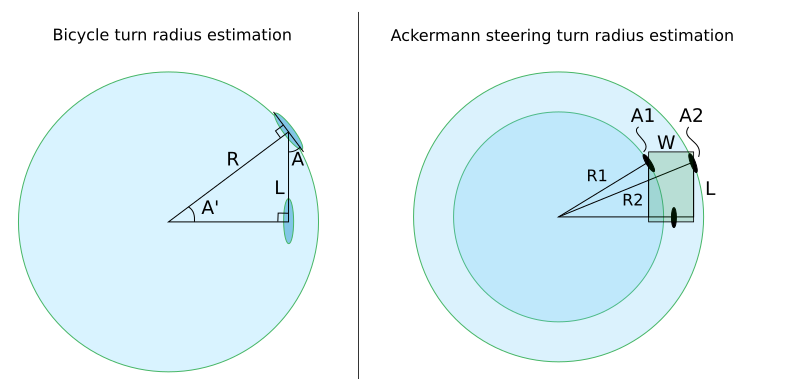
| 05:17, 9 July 2019 | Wheel-angles-small.png (file) |  |
47 KB | JosephBreithaupt | Idealized turning radius geometry for a vehicle with one (bicycle) or two (Ackermann steering) front wheels. | 1 |
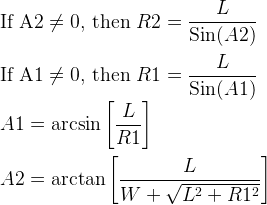
| 05:16, 9 July 2019 | Ackermann-form.png (file) |  |
4 KB | JosephBreithaupt | Calculations for turning radius and steering angles of a vehicle with two front wheels with ideal Ackermann geometry. | 1 |
| 05:13, 9 July 2019 | Bicycle-form.png (file) |  |
2 KB | JosephBreithaupt | Turning radius calculation for a vehicle with a single steering wheel. | 1 |
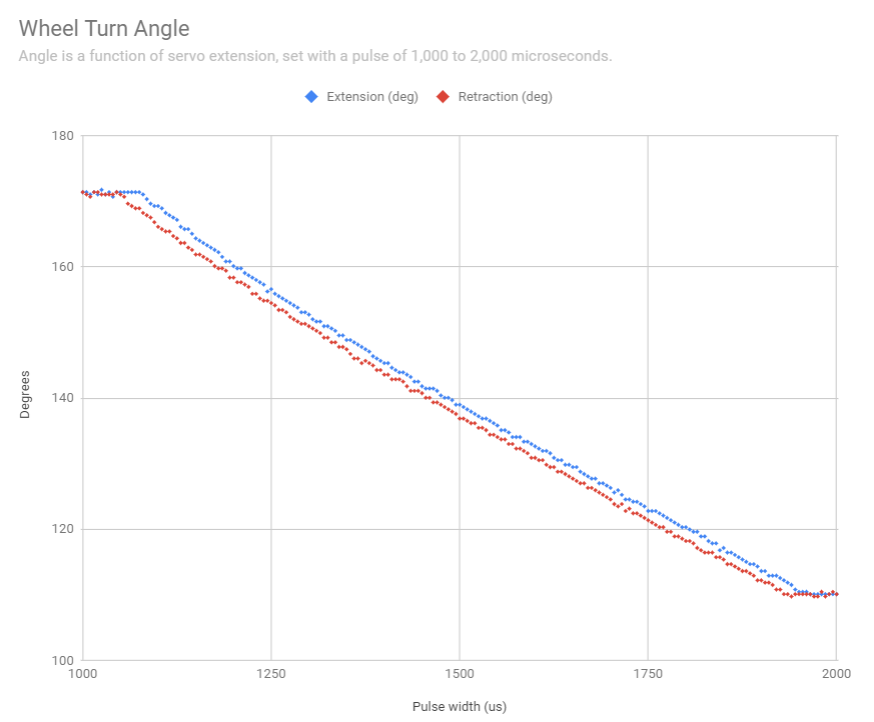
| 03:31, 2 July 2019 | Wheel-turn-angle 360-degree-sensor.png (file) |  |
50 KB | JosephBreithaupt | Shows output from a wheel turn sensor during slow steering servo extension and retraction. Input (x-axis) is pulse width in microseconds. Output (y-axis) is wheel angle, converted from the Arduino's 10-bit ADC (0-1023). Values were converted by multipl... | 1 |
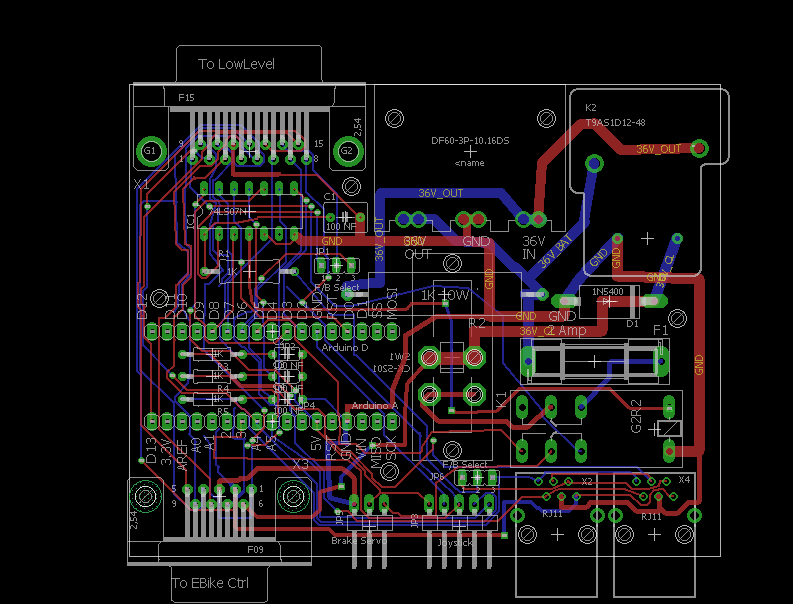
| 23:48, 1 July 2019 | PowerOn brd.png (file) |  |
51 KB | Tfolsom | PowerOn board layout | 1 |
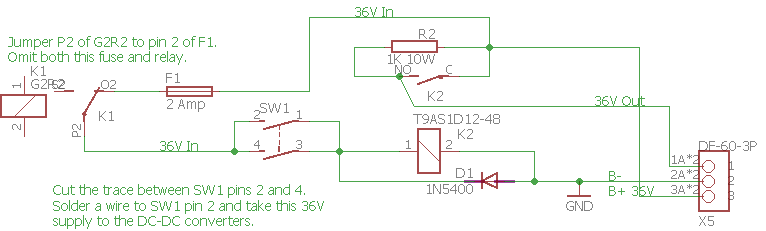
| 23:47, 1 July 2019 | PowerOnOnly.png (file) |  |
8 KB | Tfolsom | Cut and jumpers for only Kelly power on and DC-DC converters. | 1 |
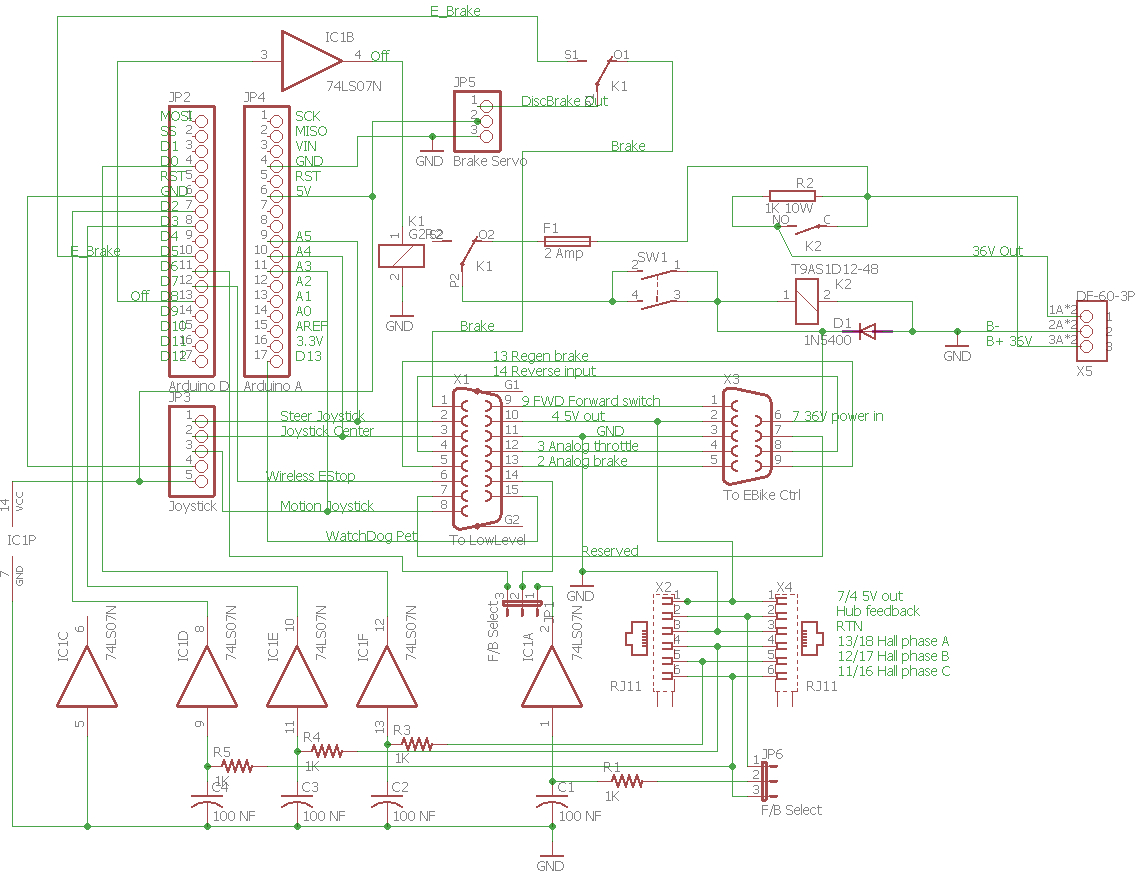
| 23:45, 1 July 2019 | PowerOn.png (file) |  |
34 KB | Tfolsom | Power On board: Kelly power-on, Hall phase conditioning, and brake PWM | 1 |
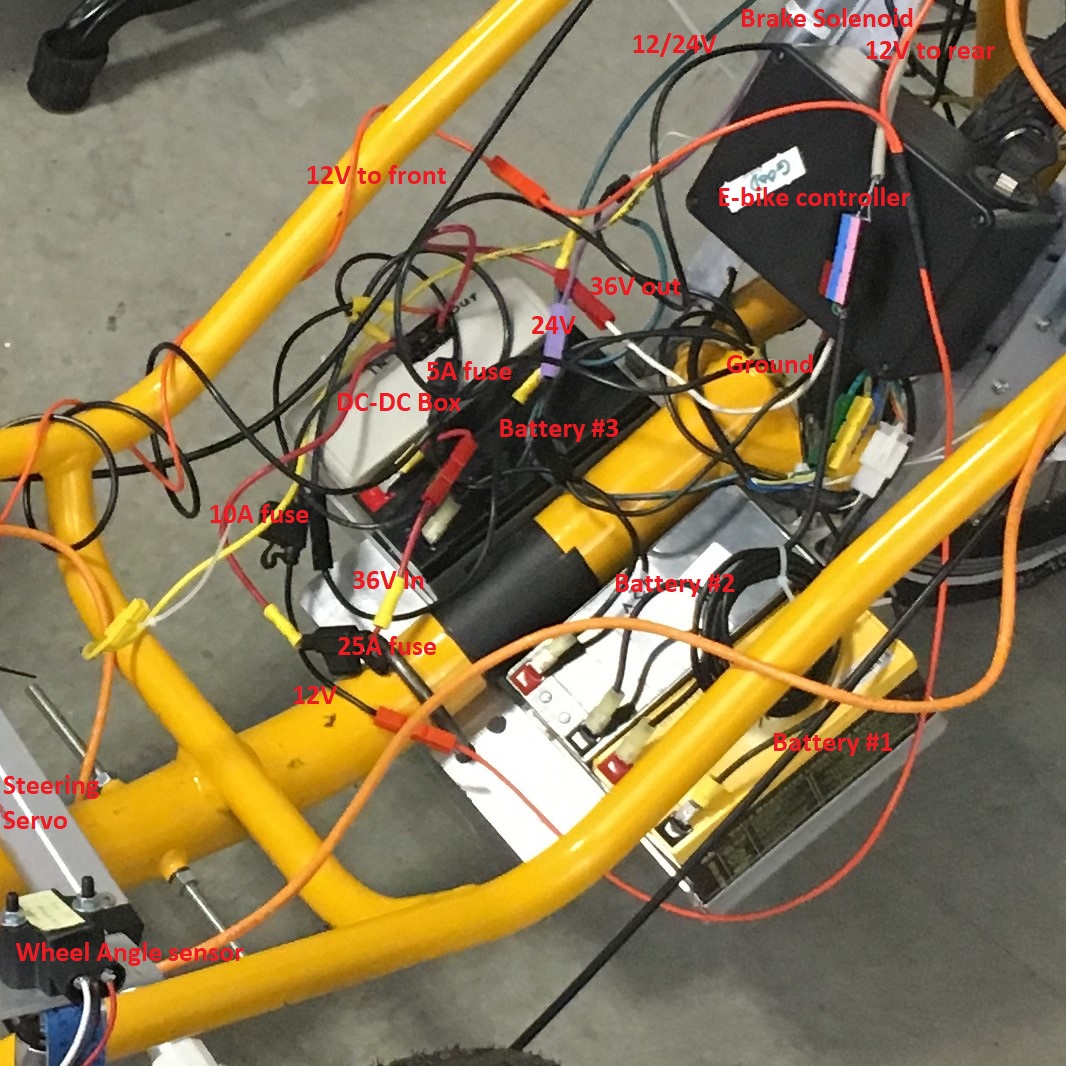
| 19:49, 1 July 2019 | Batteries-annotated.JPG (file) |  |
382 KB | Tfolsom | Annotated battery and power photo | 1 |
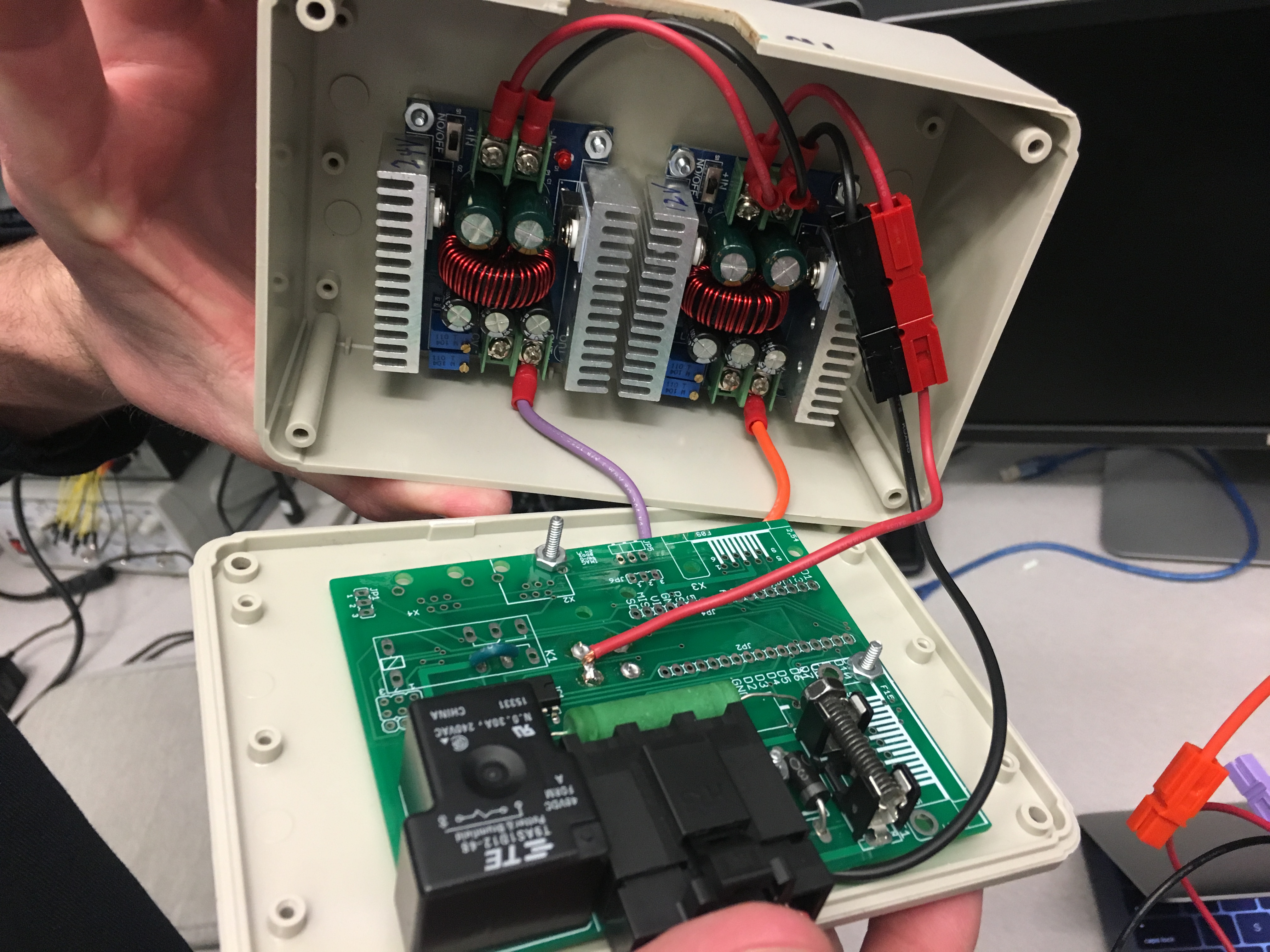
| 16:21, 1 July 2019 | DC-DC converters.jpg (file) |  |
2.14 MB | Tfolsom | The DC-DC converter box | 1 |
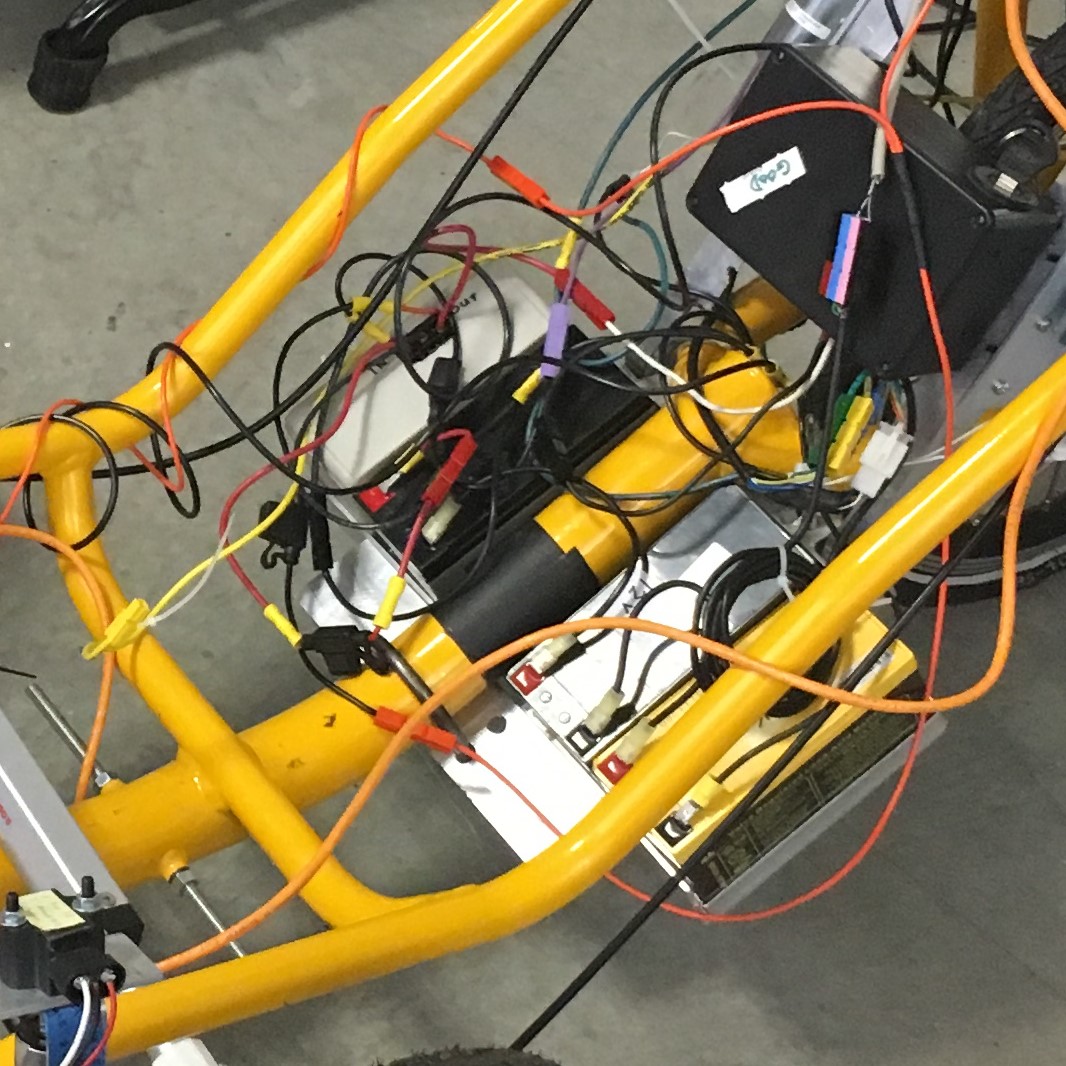
| 05:00, 28 June 2019 | Batteries.JPG (file) |  |
302 KB | Tfolsom | Batteries | 1 |
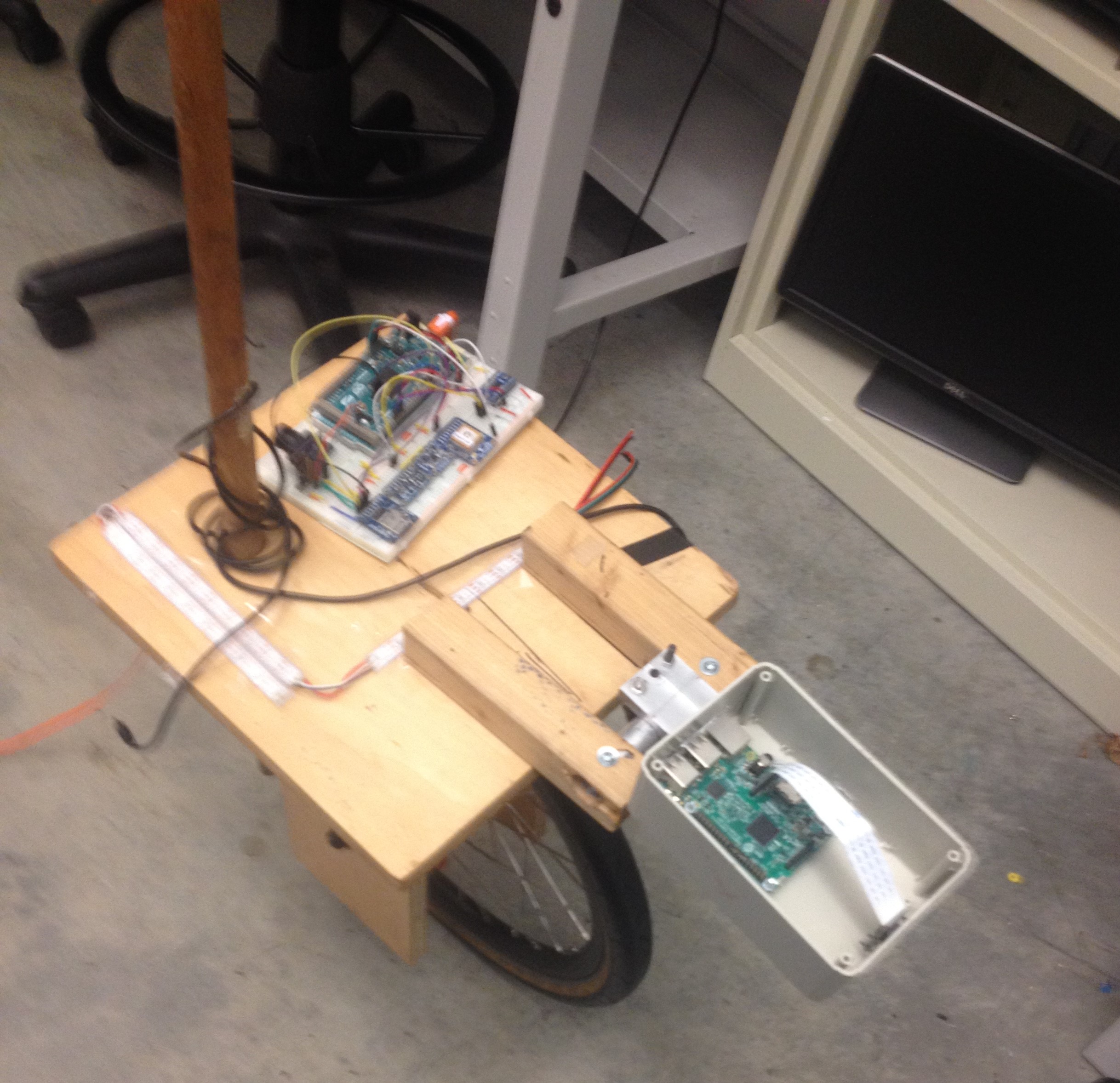
| 23:54, 27 June 2019 | OneWheelTester.JPG (file) |  |
963 KB | Tfolsom | One Wheel Test Stand provides inputs to High Level board when the trike was not operational | 1 |
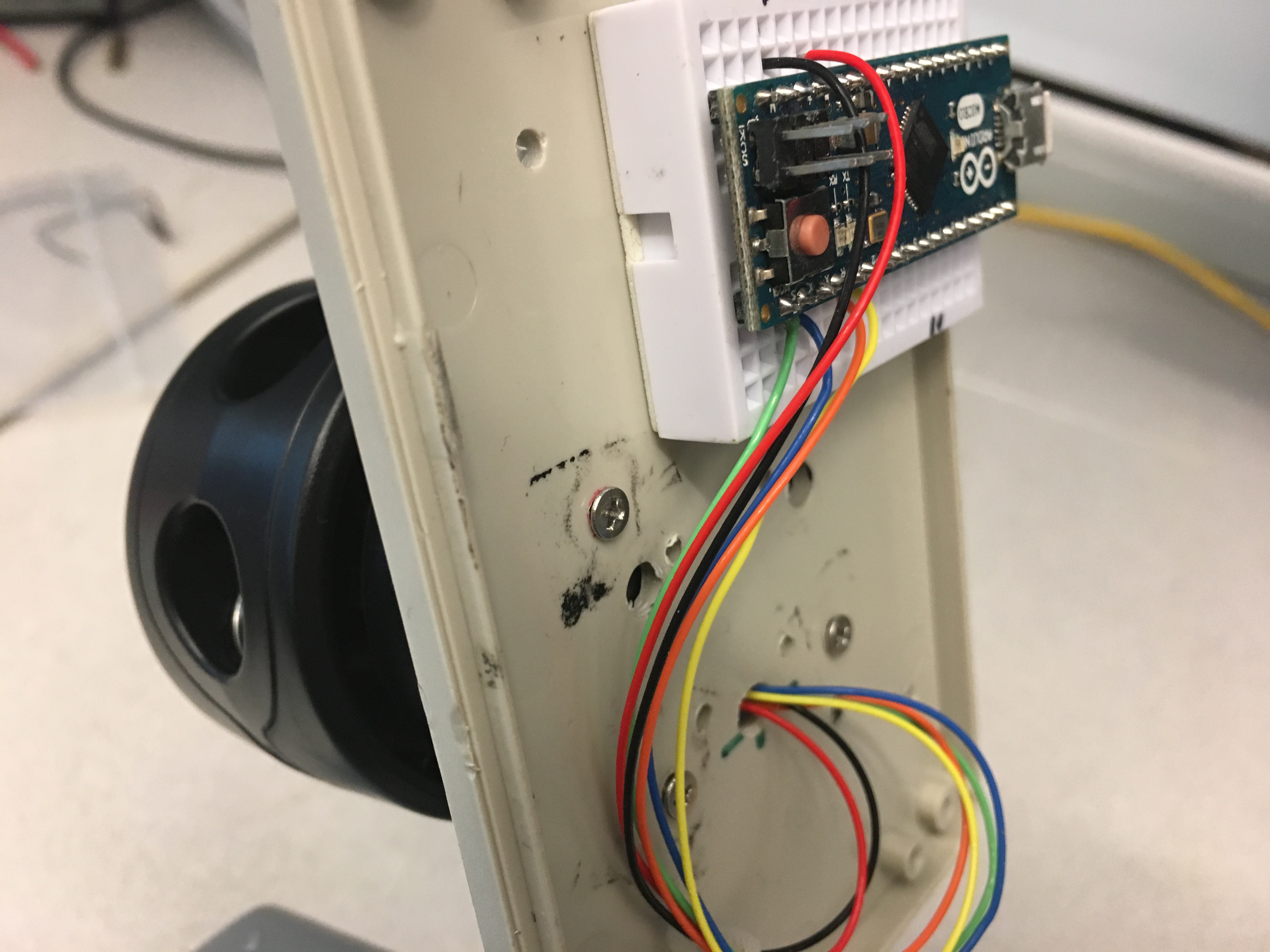
| 19:06, 27 June 2019 | Scanse Sweep.JPG (file) |  |
1.64 MB | Tfolsom | Scanse Sweep connected to Arduino Micro | 1 |
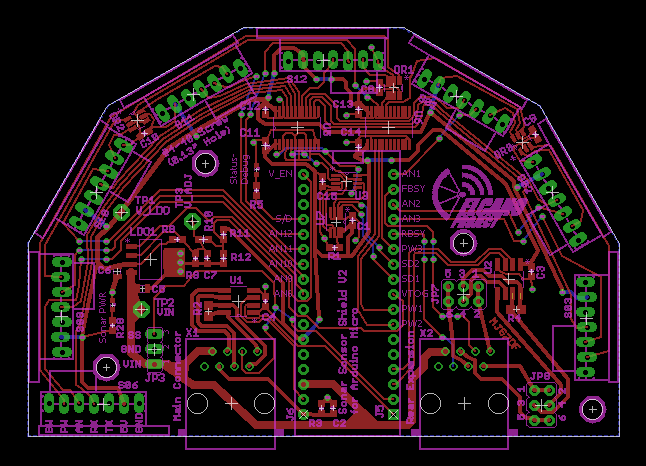
| 21:45, 26 June 2019 | SonarBoardV2 brd.png (file) |  |
51 KB | Tfolsom | Sonar Array Board version 3.0 | 1 |
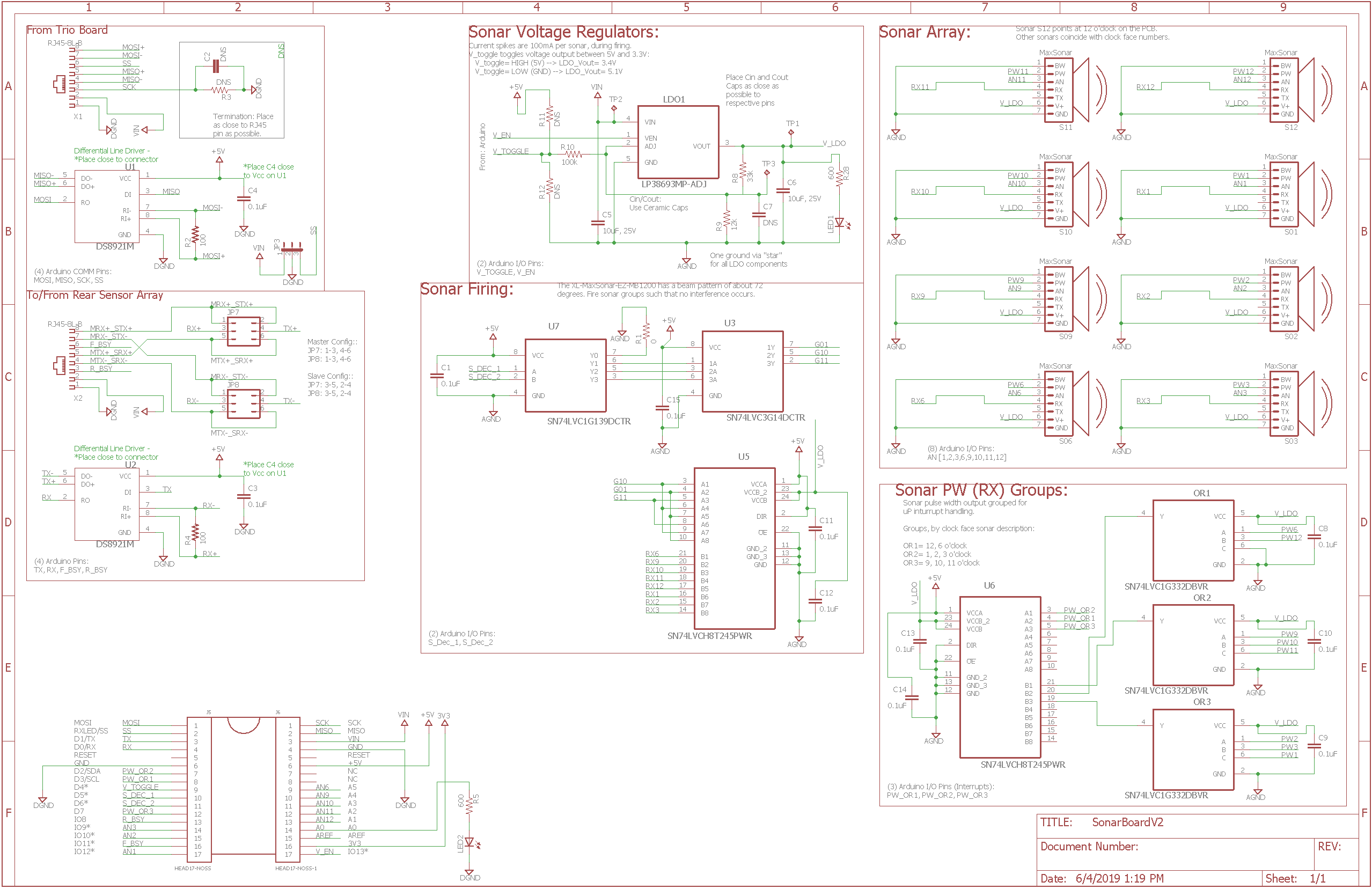
| 21:44, 26 June 2019 | SonarBoardV2.png (file) |  |
104 KB | Tfolsom | Sonar Array Schematic version 3.0 | 1 |
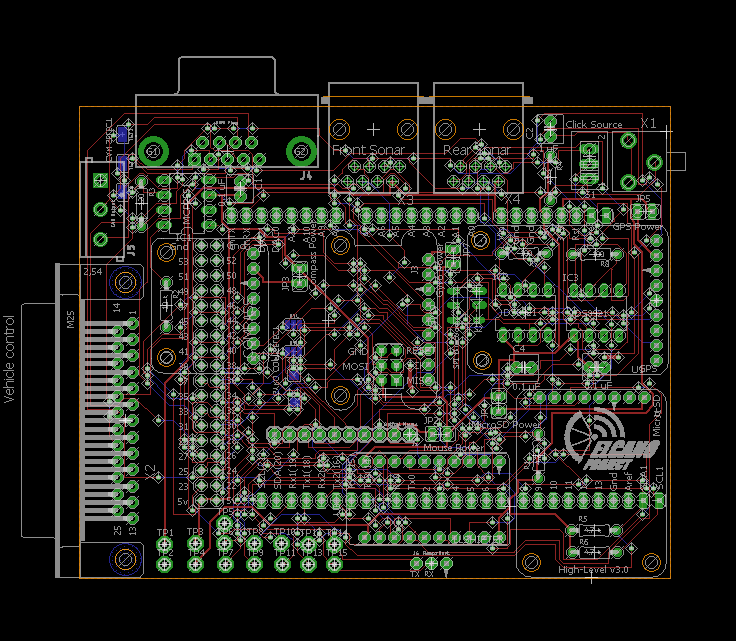
| 21:43, 26 June 2019 | High-Level PCB v3.0 brd.png (file) |  |
104 KB | Tfolsom | High Level Board version 3.0 | 1 |
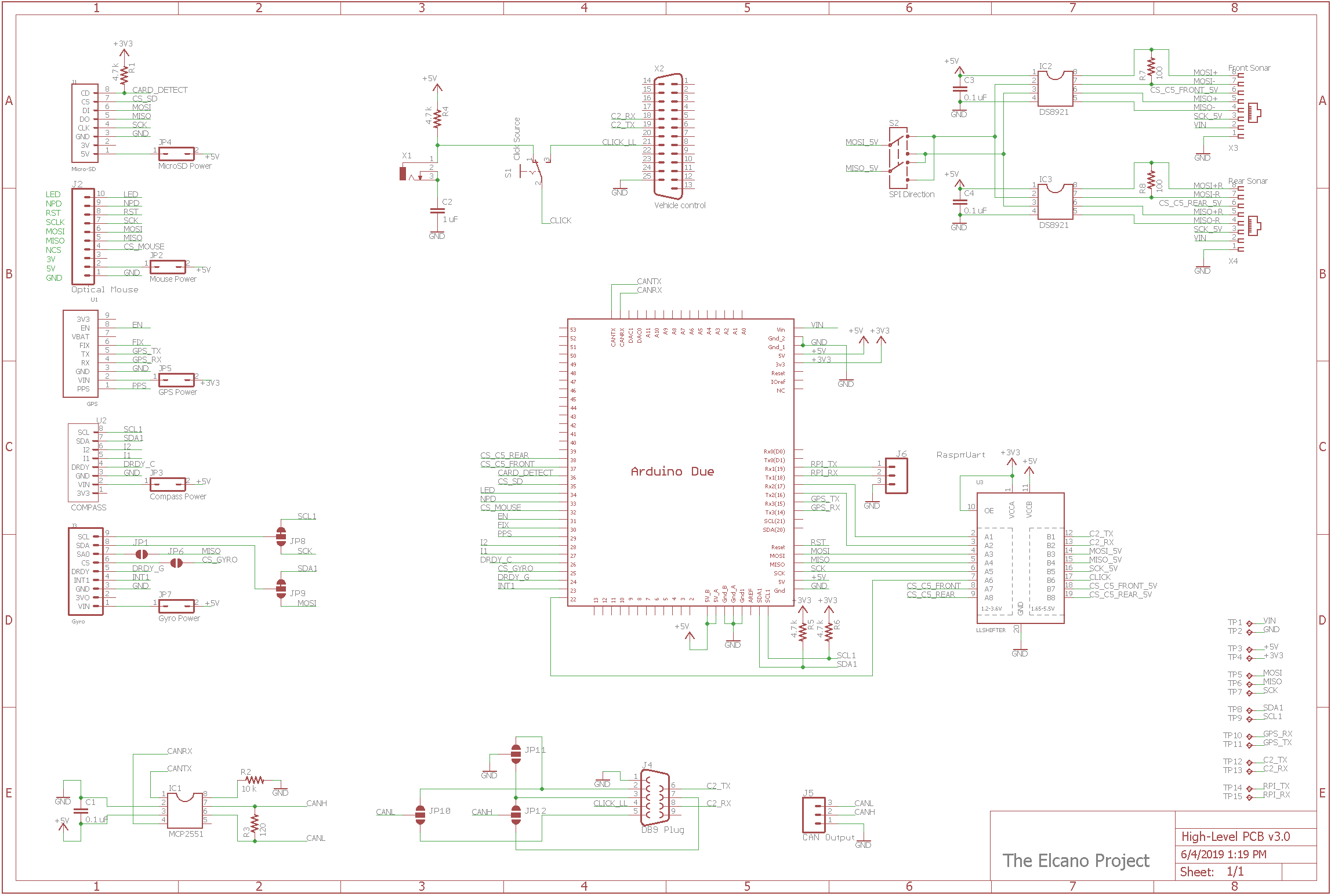
| 21:42, 26 June 2019 | High-Level PCB v3.0.png (file) |  |
72 KB | Tfolsom | High Level Schematic version 3.0 | 1 |
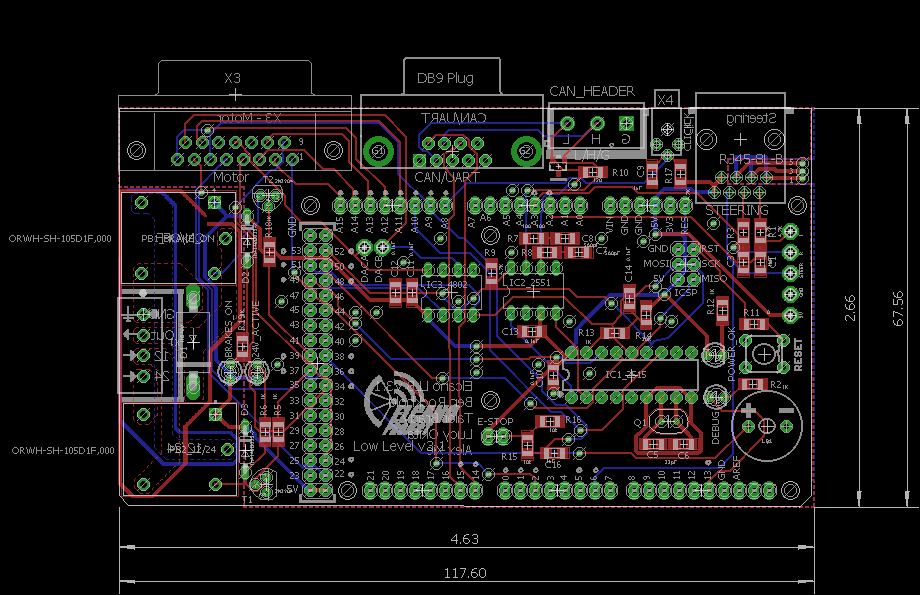
| 19:07, 26 June 2019 | LowLevelV3.1 brd.png (file) |  |
75 KB | Tfolsom | Low Level Board Version 3.1 | 1 |
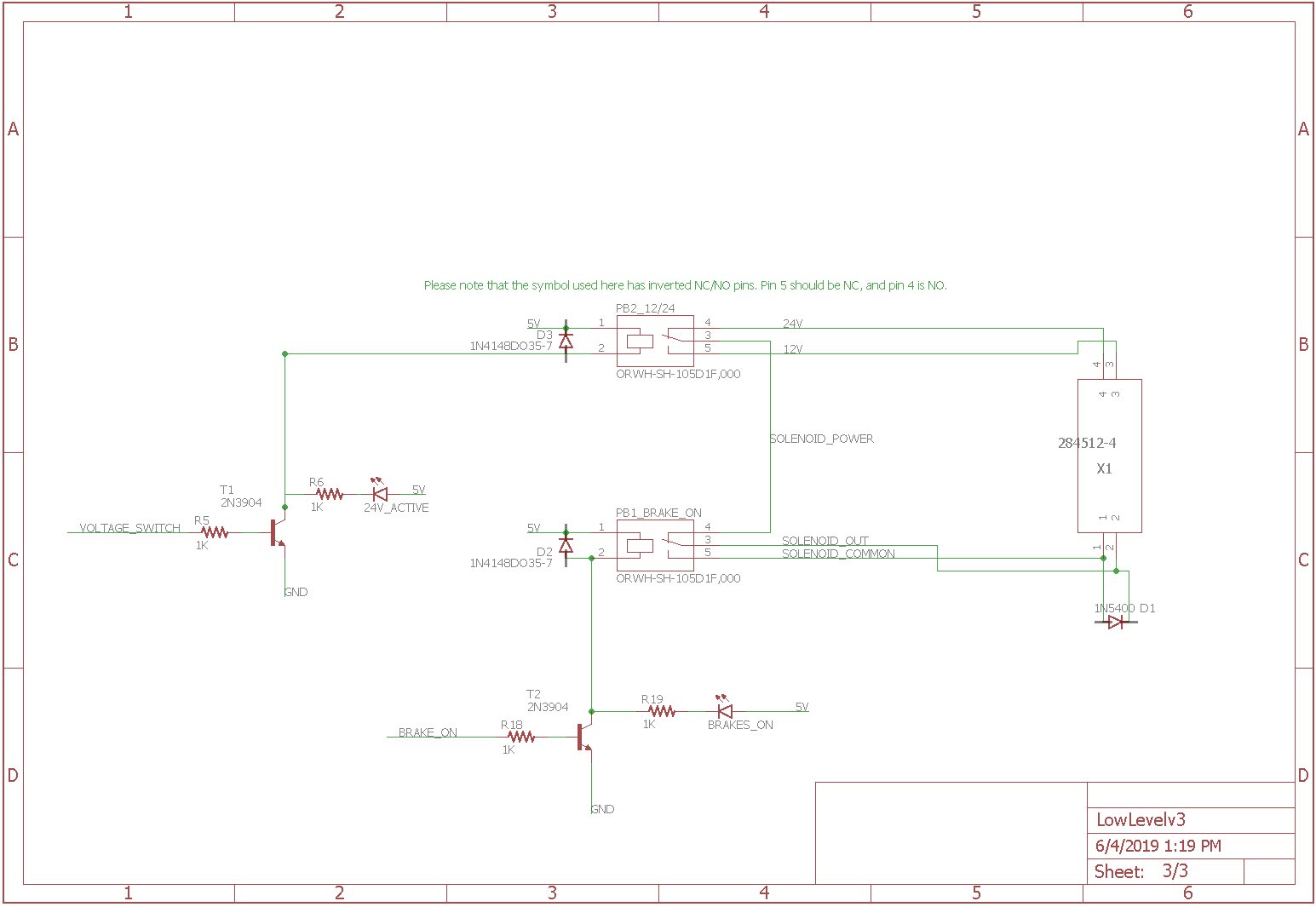
| 19:06, 26 June 2019 | LowLevelV3.1 C.png (file) |  |
20 KB | Tfolsom | Low Level Schematic Version 3.1 Sheet 3 | 1 |
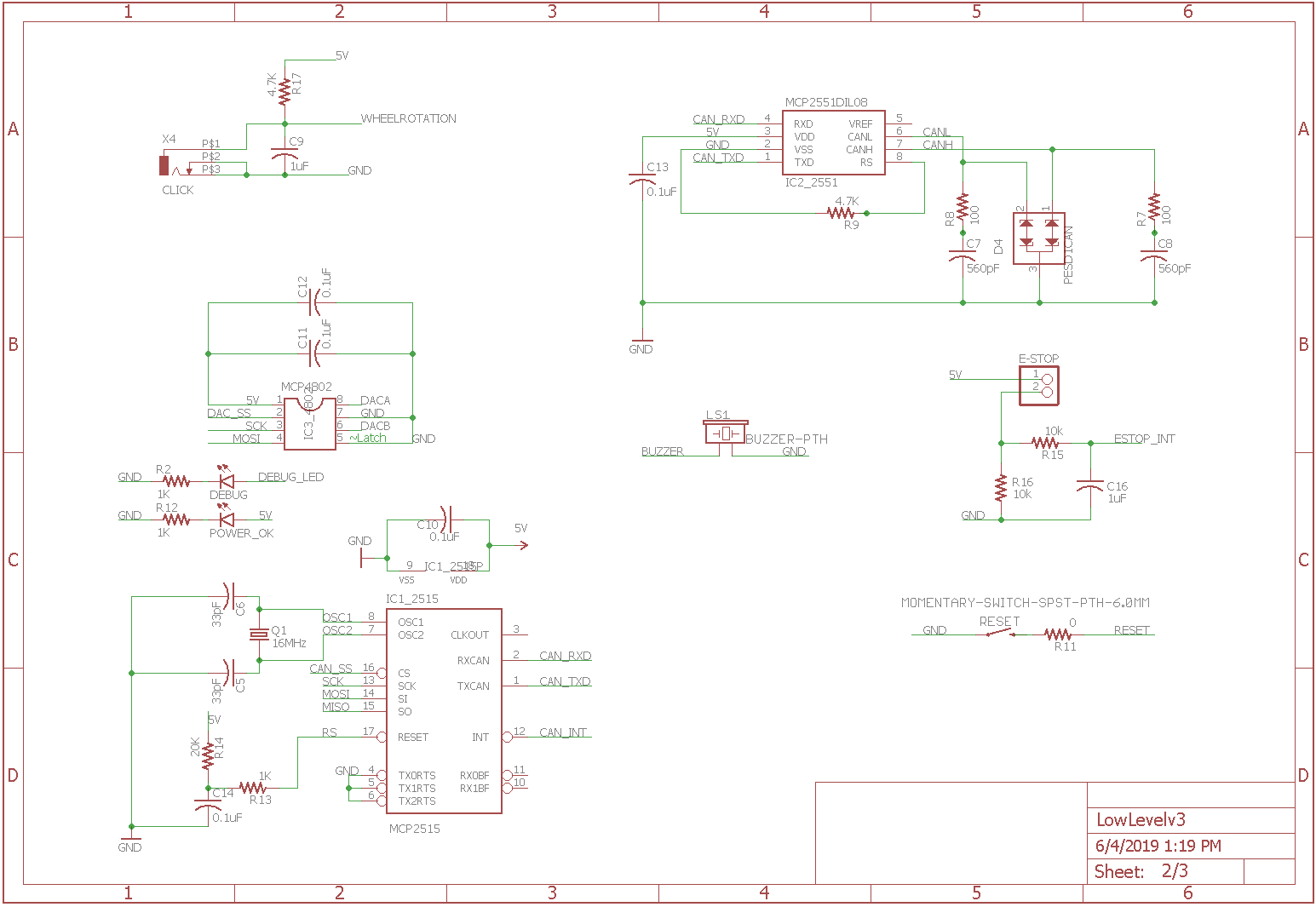
| 18:59, 26 June 2019 | LowLevelV3.1 B.png (file) |  |
31 KB | Tfolsom | Low Level Schematic Version 3.1 Sheet 2 | 1 |
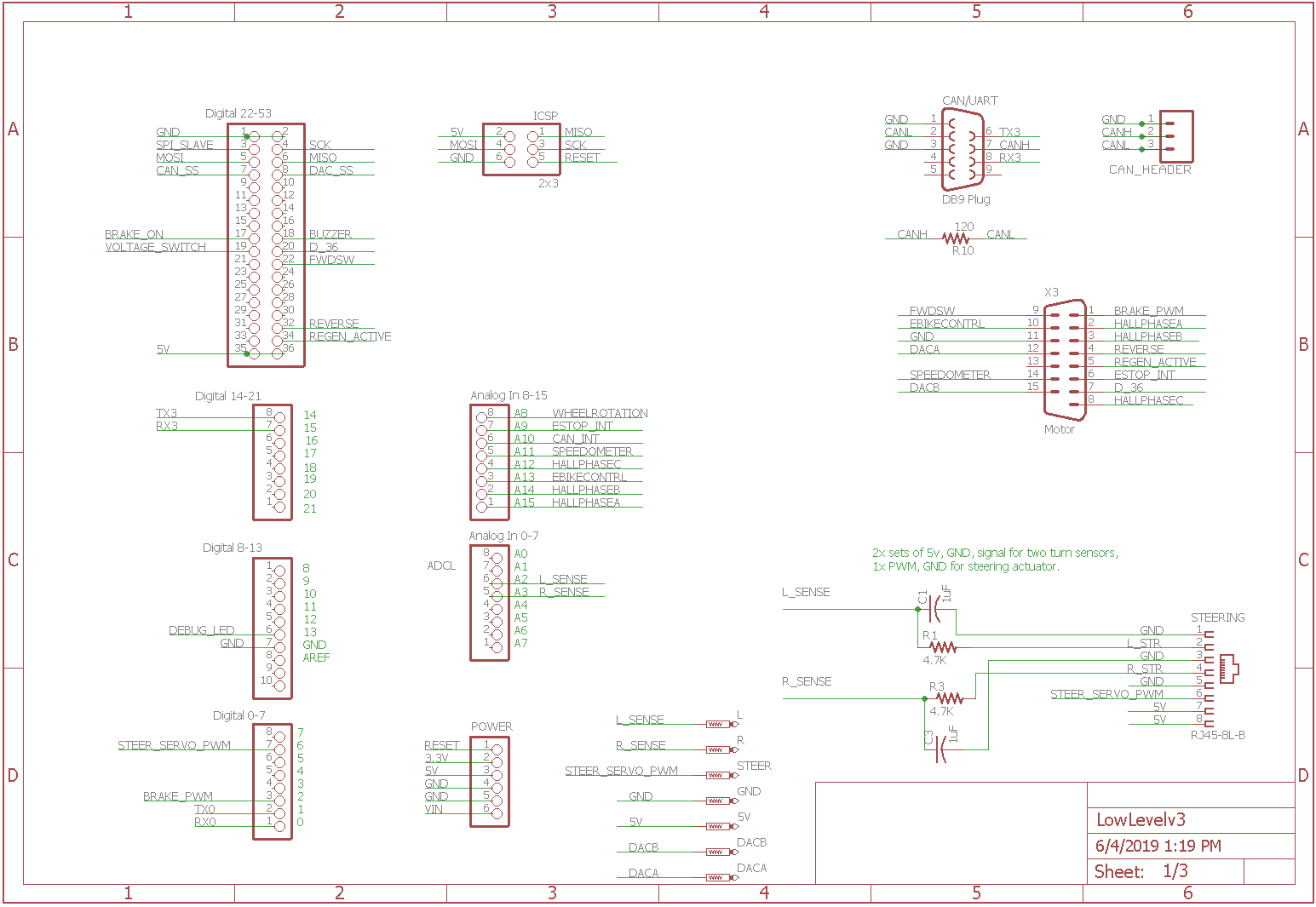
| 18:57, 26 June 2019 | LowLevelV3.1 A.png (file) |  |
41 KB | Tfolsom | Low Level Schematic Version 3.1 Sheet 1 | 1 |
| 22:22, 4 June 2019 | ELF.JPG (file) |  |
4.01 MB | Tfolsom | Elcano vehicles #3 is an Organic Transit ELF. | 1 |
| 22:19, 4 June 2019 | Catrikes.JPG (file) |  |
2.47 MB | Tfolsom | Elcano vehicles #1 and #2 are recumbent Catrikes modified so that electric throttle, brakes and steering are under computer control | 1 |
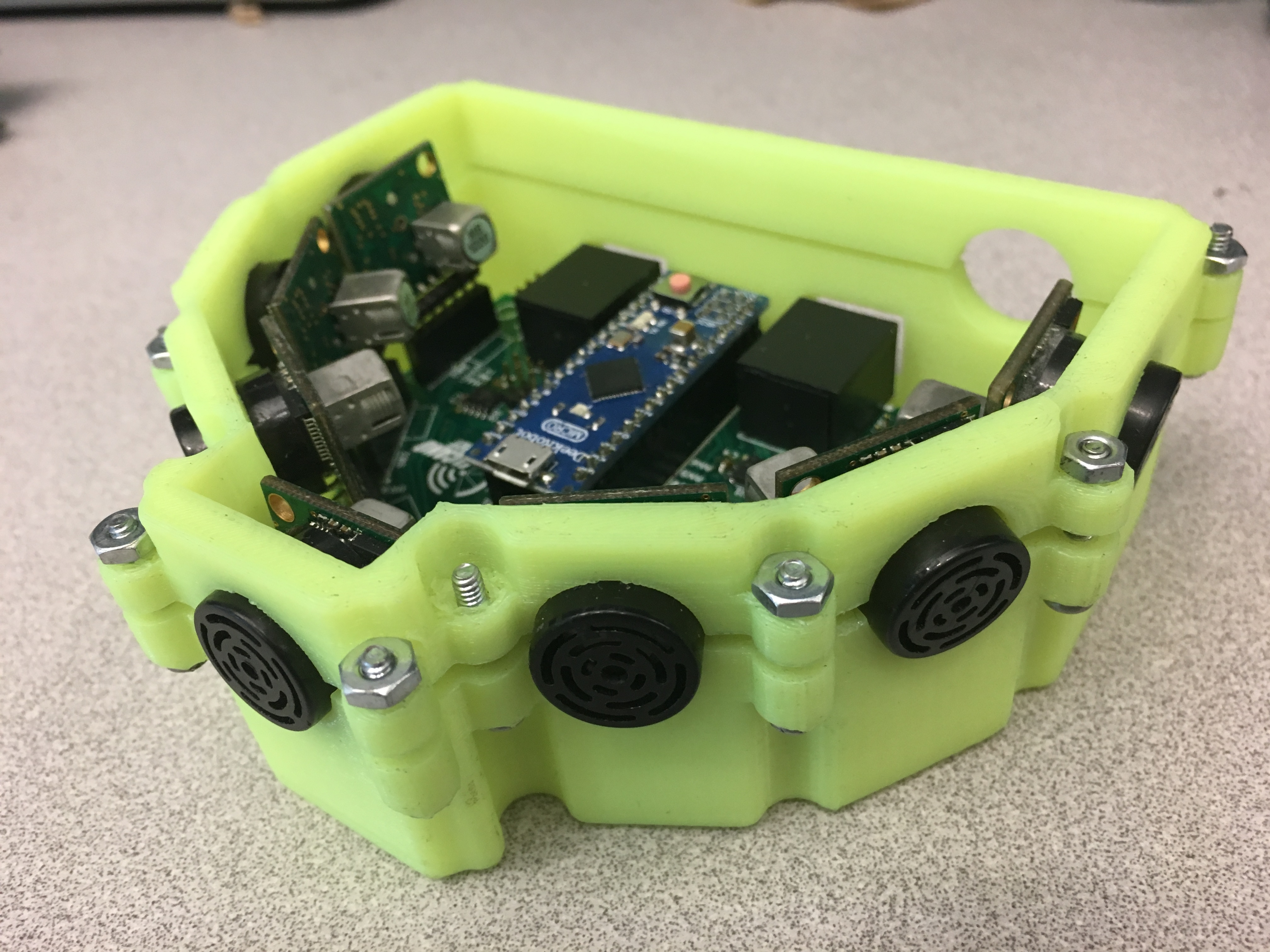
| 22:15, 4 June 2019 | SonarArray.JPG (file) |  |
1.78 MB | Tfolsom | The Sonar Array circuit board is based on the Arduino Micro. It houses 8 MaxBotix sonars in a 3D printed case. | 1 |
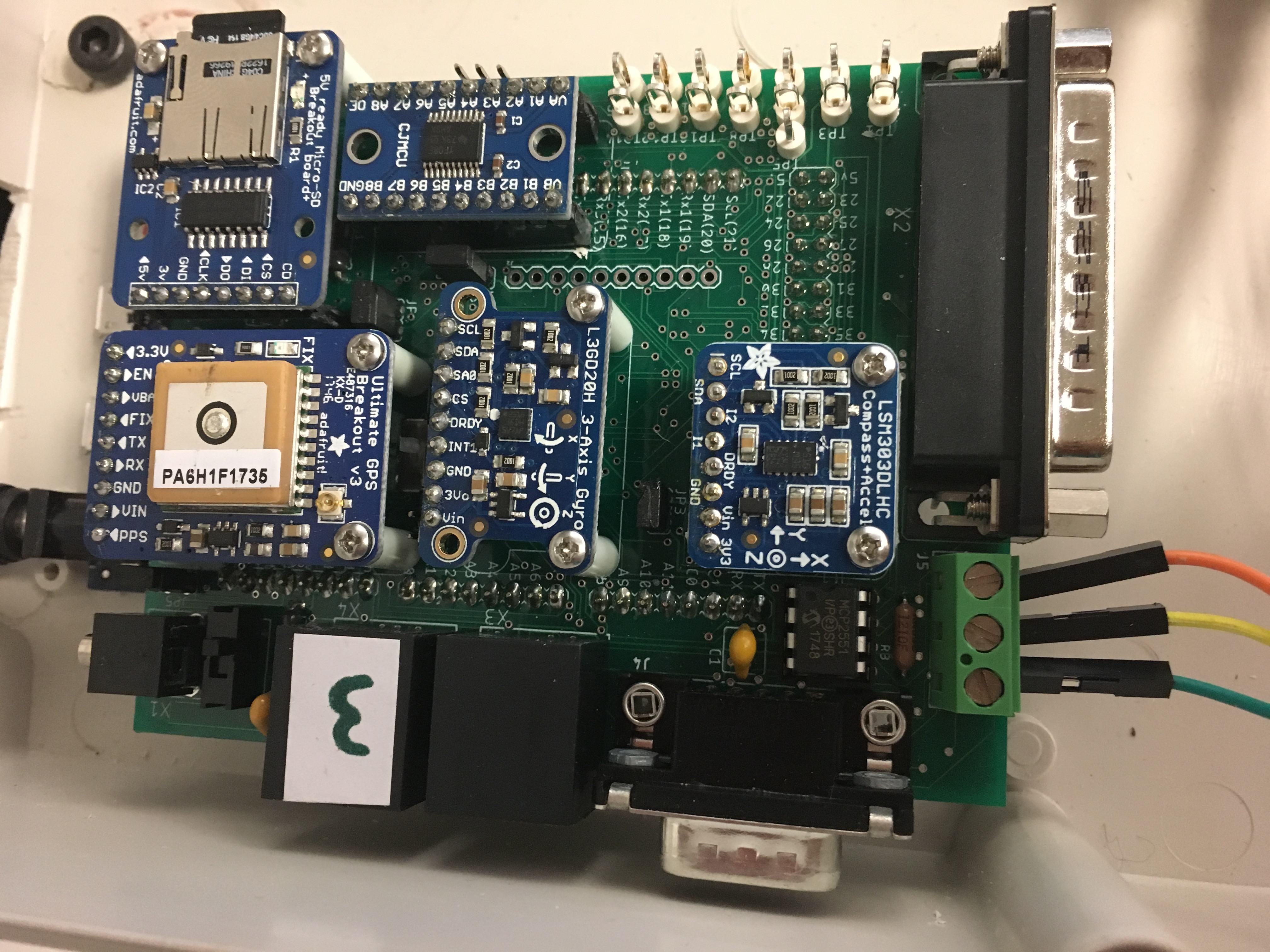
| 22:12, 4 June 2019 | HighLevel.JPG (file) |  |
2.21 MB | Tfolsom | The HighLevel circuit board is a shield for the Arduino Due. It handles localization (C6) route finding (C4) and Pilot (C3). It has sensors for GPS, INU, and Gyros. The SD card holds a digital map. Main communication is over CAN bus | 1 |
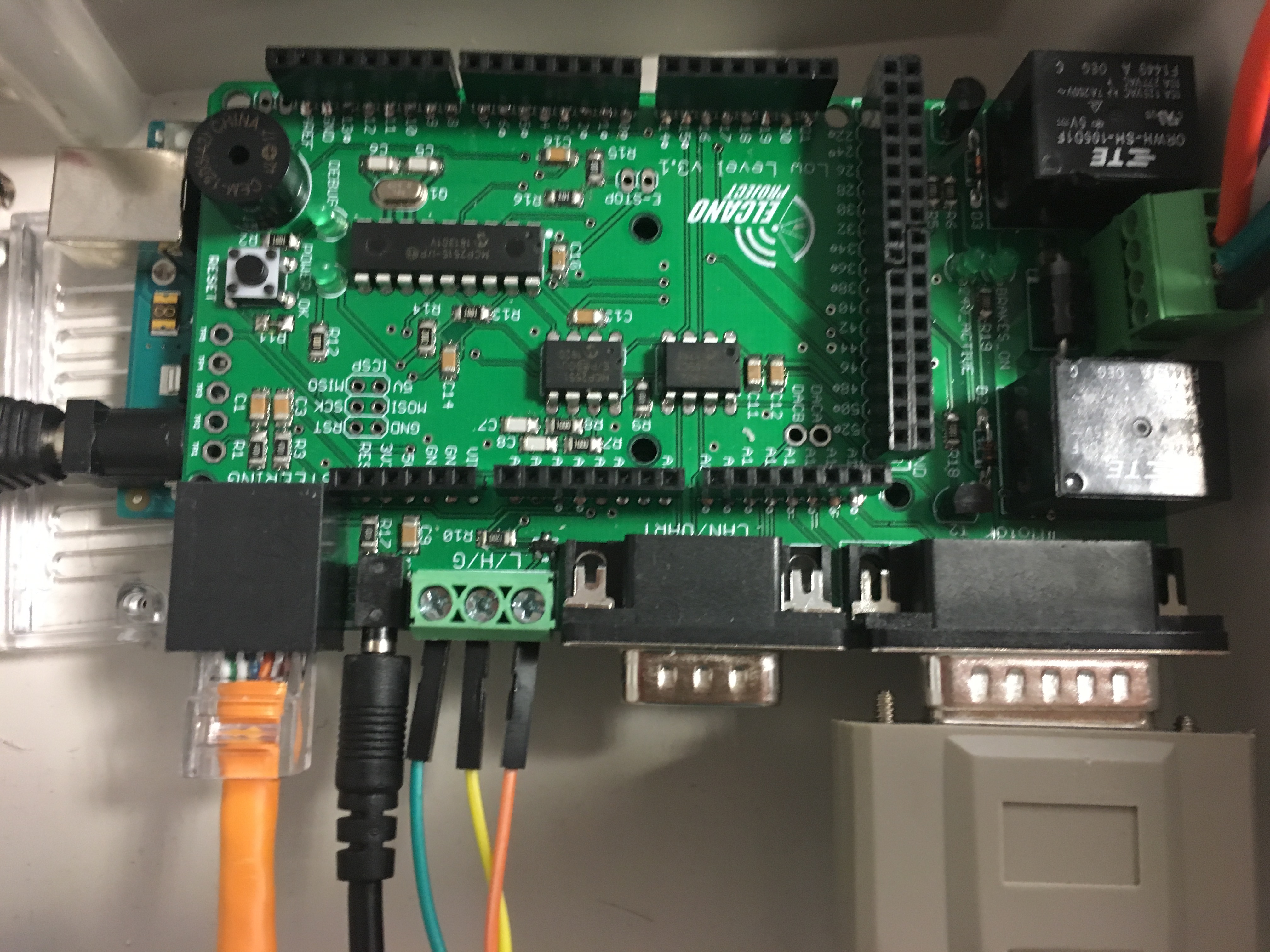
| 22:06, 4 June 2019 | LowLevel.JPG (file) |  |
2.05 MB | Tfolsom | The LowLevel circuit board is a shield for the Arduino Mega. It supplies DAC, CAN bus, brake relays and interface to sensors. | 1 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}