
We are building open source autonomy for everyone
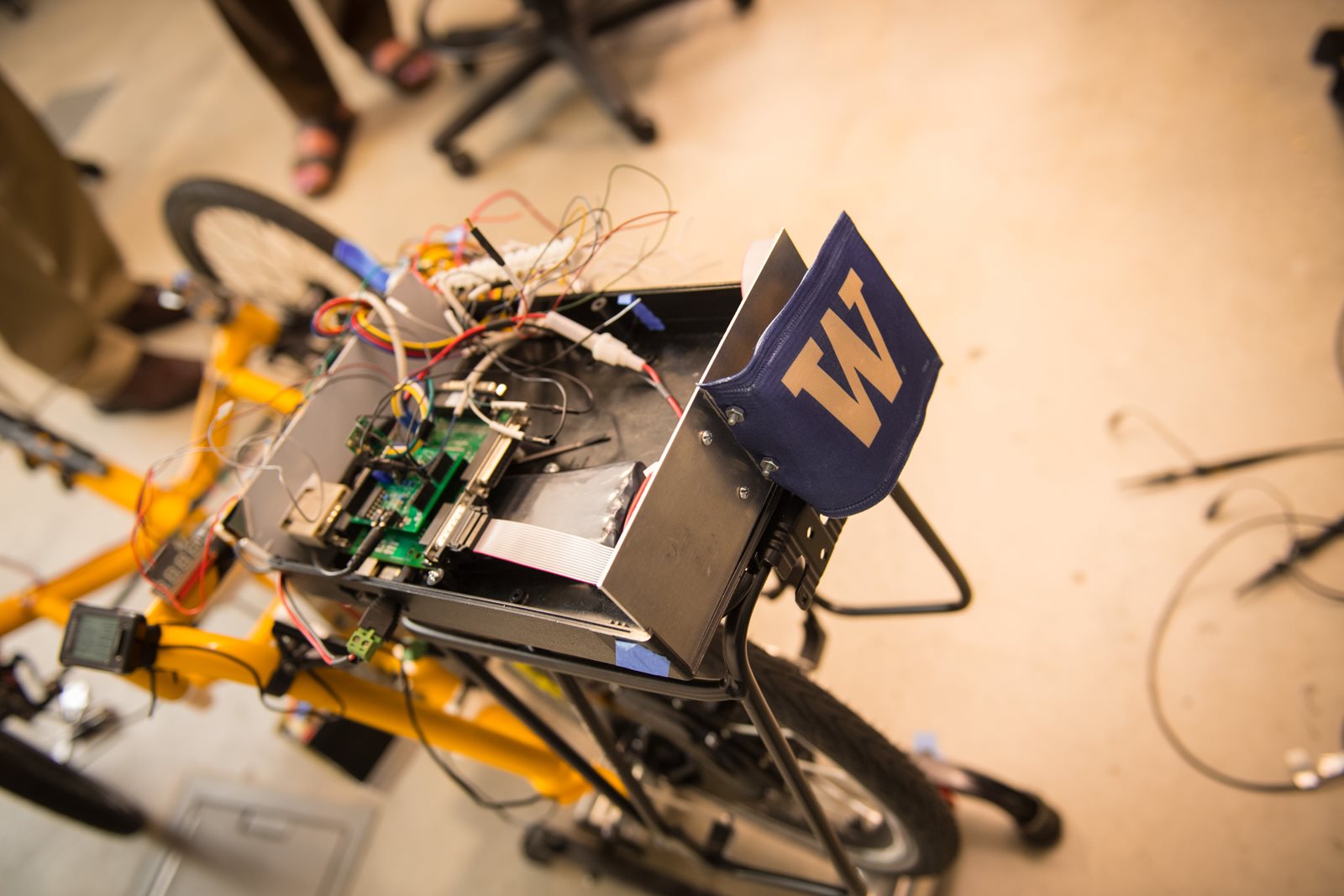
Want to experiment with automation? Our kit will probably work on your vehicle.

Automated bikes can move people in the city with 30 times less energy than cars. No more fossil fuels!
Tyler C. Folsom
Email: tfolsom@uw.edu
Affiliate Professor
Division of Computing and Software Systems
School of Science Technology, Engineering and Mathematics
University of Washington Bothell
321B UW-1 18115 Campus Way NE, Bothell, WA 98011